西门子s7-200定位控制、监视与位置校正的应用
来源:电工天下时间:2020-03-10 17:58:40 作者:老电工手机版>>
以下是小编整理的西门子s7-200定位控制、监视与位置校正的应用文章,供大家学习参考。
本例相对位置山增量传感器进行位置监视。为了求出传感器信号,将该信号作为CPU 214中的最大可处理7kHz信号的高速计数器的输入,这样,就可检测出位置误差。
例如,当起一停频率超出时,通过步数丢失可以检测到位置错误。一旦检测出位置误差,就以较低频率进行位置校正。
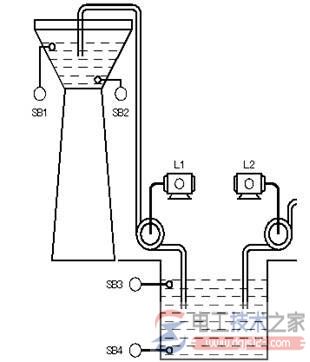
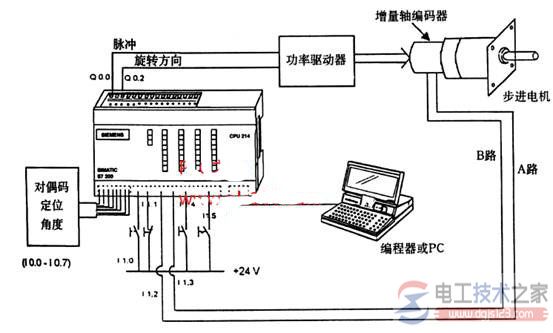
实现功能:用S7-200 CPU 214 DC/DC/DC进行定位控制,并具有位置监视和位置校正。
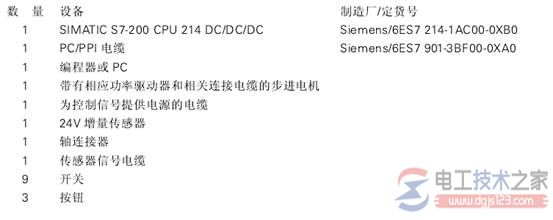
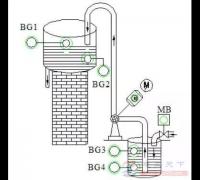
硬件要求:
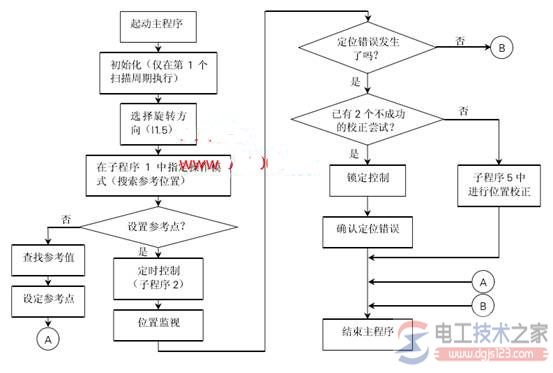
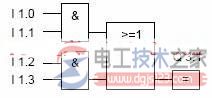
程序框图:
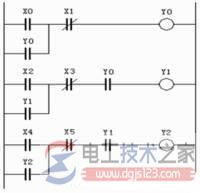
程序与注解
一、初始化
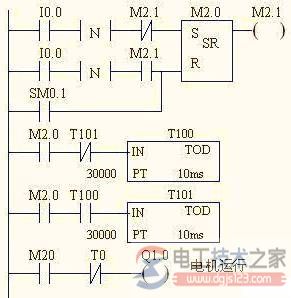
在程序的第一个扫描周期((SM0.1=1)设置重要的参数。此外,高速计数器HSC2由外部复位并初始化为A/B计数器。HSC2对检测定位的增量轴编码器信号计数。
传感器的A路和B路信号分别作为CPU输入端I1.2和I1.3的输入。旋转方向的选择、按钮锁定、操作模式的选择及定位的过程 (请参考此例概述)。
由增量传感器进行定位监视,在输出脉冲结束之后,等待T1时间,以便使连接电机和传感器的轴连接器的扭转振动消失。
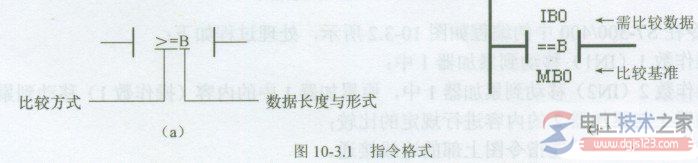
二、实际值和设定值的比较
T1到时后,子程序4对实际值和设定值进行比较。如果轴的位置在设定位置的±2步范围内,定位就是正确的。如果实际位置在此目标范围之外,当超过起停频率时,那就会造成电机失步这种情况的发生,此时,一个相应的警告信号就会则Q1.1输出。
三、位置的较正
若定位错误被检测出来,则起动第二等待定时器T2。此后,根据设定值和实际值之间的差值计算出校正的步数。当校正时,电动机频率低于起停频率,以防新的步数丢失。
四、校正取消
如果在两次校正尝试之后还小能达到设定位置,为女全起见,控制将被锁定(M0.2=1 )。只有按下确认按钮I1.4之后,控制才被打开,然后,进行另一个参考点的检测。
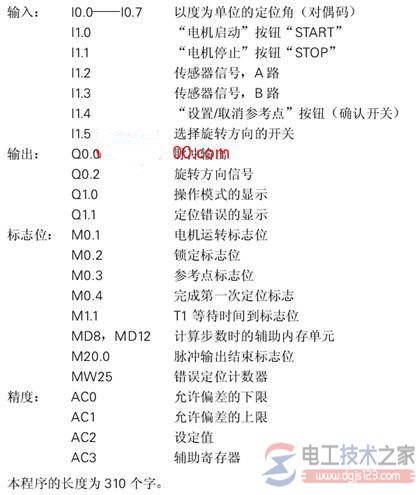
五、信号清单
相关文章西门子s7系列plc脉冲定时器Pulse Timer的实例
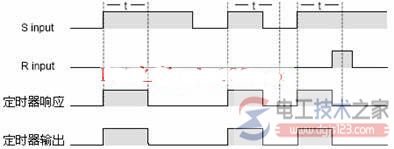
西门子s7系列plc脉冲定时器Pulse Timer的实例,脉冲定时器时序,STL语句表,装入定时时间到ACCU1,启动脉冲定时器T5,有关脉冲定时器Pulse Timer的FBD功能图与时序图。
时间:2022-09-18 08:23:19
西门子s7-200 plc控制泵往复循环运行的梯形图程序
西门子s7-200 plc控制泵往复循环运行的梯形图程序,PLC梯形图程序实现泵每五分钟工作一次,工作五分钟后,再停五分钟,循环往复运行,介绍了其动作原理的相关知识。
时间:2022-09-18 08:23:05
西门子s7-300 plc的位逻辑操作实例讲解
西门子s7-300 plc的位逻辑操作的几个例子,位逻辑指令的运算规则:“先与后或”,通过二个例子,介绍了s7-300 plc的位逻辑操作的功能图、梯形图与语句表的实现方法。
时间:2022-09-18 08:22:24
西门子simatic s7-200高速计数器的用法
西门子simatic s7-200高速计数器的用法,SIMATIC S7-200的高速计数器(HSC),负责处理来自传感器(如编码器)的信号,高速计数器可采用多种不同的组态功能。
时间:2022-09-17 11:40:00
西门子plc程序实例:led数码管显示9-5控制系统
有关西门子plc的编程例子,一个led数码管显示9-5控制系统,根据要求用西门子plc设计控制系统,并进行程序调试,以下是该plc程序的i/o地址分配与程序梯形图,有需要的朋友参考下。
时间:2022-01-21 07:56:15
西门子plc程序实例:水塔水位控制系统设计
有关西门子plc的编程实例,一个水塔水位控制系统,根据问题要求用西门子plc设计控制程序,并进行模拟仿真调试,以下是该plc程序的i/o地址分配与程序梯形图,供大家参考。
时间:2022-01-21 07:53:48
西门子PLC实例:LED舞台灯控制系统设计

有关西门子PLC的编程实例,一个舞台灯光的控制系统设计,参考如下的舞台灯光布置示意图,用西门子PLC来编写控制系统,并且进行程序调试,有需要的朋友参考下。
时间:2022-01-21 07:49:28
西门子PLC编程实例:一个按钮控制2盏灯
有关西门子PLC的编程例子,如何用一个按钮控制2盏灯的亮与灭,使用西门子PLC,并按照要求编写梯形图程序,以下是I/O地址分配与梯形图程序,有需要的朋友参考下。
时间:2022-01-21 07:48:09