【图】西门子plc四节传送带控制系统的实现方法
来源:电工天下时间:2015-11-04 11:41:39 作者:老电工手机版>>
西门子plc四节传送带控制系统的实现方法
一、设计目标
用PLC构成四节传送带控制系统
二、实验内容
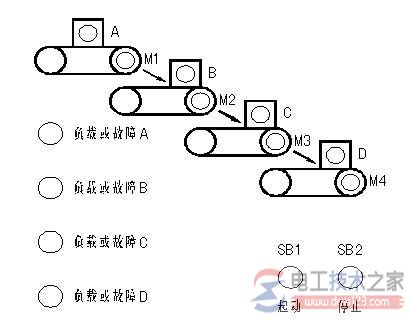
1、控制要求
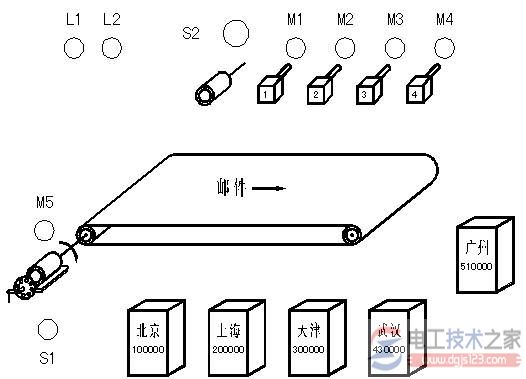
起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止;当某条皮带机有重物时,该皮带机前面的应立即停止,该皮带机运行1s后停止,再1s后接下去的一台停止,依此类推
2、I/O分配
输入 输出
起动按钮: I0.0 M1:Q0.1
停止按钮: I0.5 M2:Q0.2
负载或故障A:I0.1 M3:Q0.3
负载或故障B:I0.2 M4:Q0.4
负载或故障C:I0.3
负载或故障D:I0.4
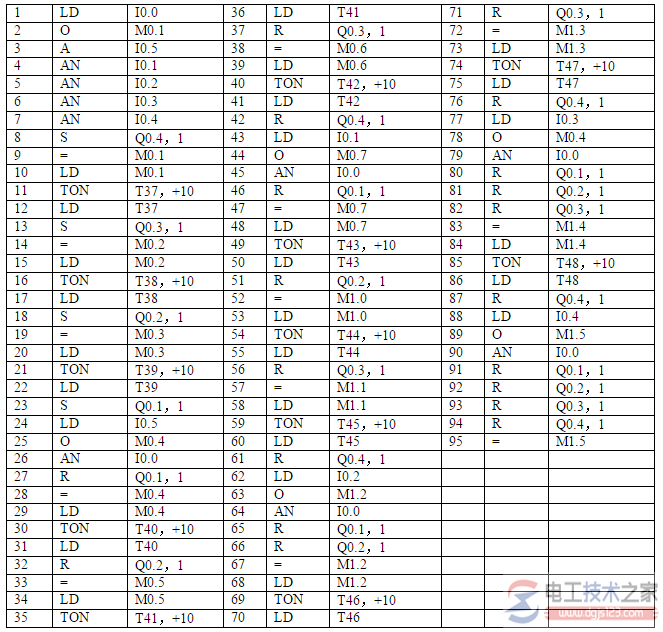
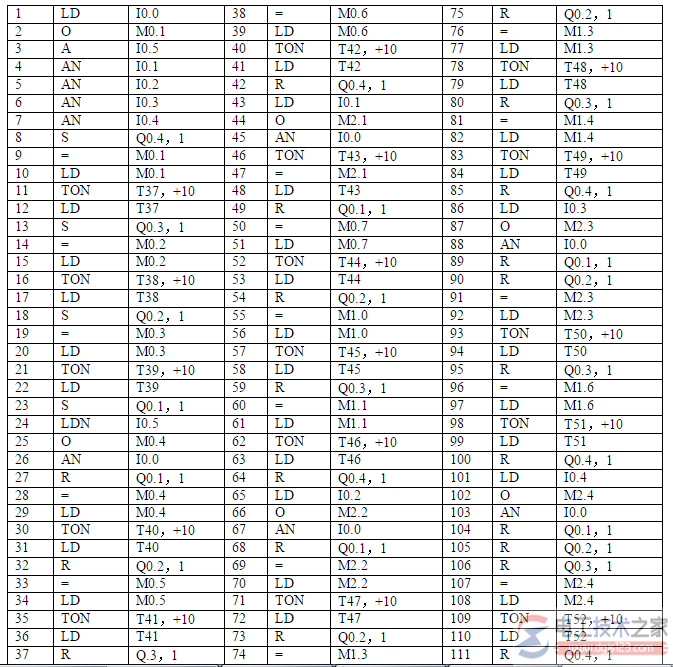
三、四节传送带故障设置控制语句表
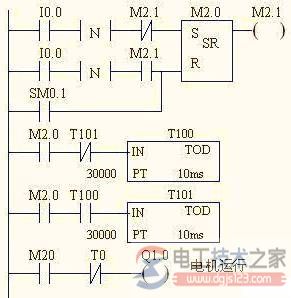
四、四节传送带故障设置控制梯形图
五、四节传送带载重设置控制语句表
相关文章西门子s7-200 plc控制泵往复循环运行的梯形图程序
西门子s7-200 plc控制泵往复循环运行的梯形图程序,PLC梯形图程序实现泵每五分钟工作一次,工作五分钟后,再停五分钟,循环往复运行,介绍了其动作原理的相关知识。
时间:2022-09-18 08:23:05
西门子plc程序实例:led数码管显示9-5控制系统
有关西门子plc的编程例子,一个led数码管显示9-5控制系统,根据要求用西门子plc设计控制系统,并进行程序调试,以下是该plc程序的i/o地址分配与程序梯形图,有需要的朋友参考下。
时间:2022-01-21 07:56:15
西门子plc程序实例:水塔水位控制系统设计
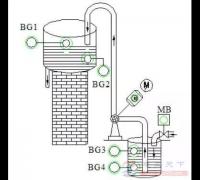
有关西门子plc的编程实例,一个水塔水位控制系统,根据问题要求用西门子plc设计控制程序,并进行模拟仿真调试,以下是该plc程序的i/o地址分配与程序梯形图,供大家参考。
时间:2022-01-21 07:53:48
西门子PLC实例:LED舞台灯控制系统设计

有关西门子PLC的编程实例,一个舞台灯光的控制系统设计,参考如下的舞台灯光布置示意图,用西门子PLC来编写控制系统,并且进行程序调试,有需要的朋友参考下。
时间:2022-01-21 07:49:28
西门子PLC编程实例:一个按钮控制2盏灯
有关西门子PLC的编程例子,如何用一个按钮控制2盏灯的亮与灭,使用西门子PLC,并按照要求编写梯形图程序,以下是I/O地址分配与梯形图程序,有需要的朋友参考下。
时间:2022-01-21 07:48:09
西门子plc实例:传送带方向检测功能
有关西门子plc编程的例子,一个传送带运动方向检测功能,可以用西门子plc编程来实现,当检测到物体时动作(闭合),使用梯形图编程,给出i/o端口分配表,有需要的朋友参考下。
时间:2022-01-21 07:46:38
西门子S7-200系列PLC实例:传送带生产计数
有关西门子S7-200系列PLC的编程例子,用PLC程序实现传送带生产计数的功能,以下是具体的任务需求,s7-200系列PLC的I/O分配与程序设计实现过程,有需要的朋友参考下。
时间:2022-01-19 07:16:20
西门子s7-200系列plc实例:抢答器控制程序
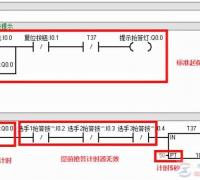
有关西门子s7-200系列plc的编程例子,用plc实现一个简单的抢答器控制程序,主持人与选手间操作抢答器的设计要求,以及完整的plc程序设计,供大家学习参考。
时间:2022-01-19 07:14:41