步进电动机的基本参数_步进电动机的特点
来源:电工天下时间:2020-02-18 10:35:10 作者:老电工手机版>>
有关步进电动机的基本参数,包括电机固有步距角,步进电动机的相数,保持转矩,步距精度,静态温升与动态温升等,并介绍了步进电动机的主要特点。
一、步进电动机的基本参数
1、电机固有步距角:它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为“电机固有步距角”,它不一定是电机工作时的实际步距角,实际步距角和驱动器有关。
2、步进电动机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电动机。
电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72°。步进电动机增加相数能提高性能,但步进电机的结构和驱动电源都会更复杂,成本也会增加。
3、保持转矩(HOLDINGTORQUE):也叫最大静转矩,是在额定静态电流下施加在已通电的步进电动机转轴上而不产生连续旋转的最大转矩。
它是步进电动机最重要的参数之一,通常步进电动机在低速时的力矩接近保持转矩。由于步进电动机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电动机。
4、步距精度:可以用定位误差来表示,也可以用步距角误差来表示。
5、矩角特性:步进电动机的转子离开平衡位置后所具有的恢复转矩,随着转角的偏移而变化。步进电动机静转矩与失调角的关系称为矩角特性。
6、静态温升:指电机静止不动时,按规定的运行方式中最多的相数通以额定静态电流,达到稳定的热平衡状态时的温升。
7、动态温升:电机在某一频率下空载运行,按规定的运行时间进行工作,运行时间结束后电机所达到的温升叫动态温升。
8、转矩特性:它表示电机转矩和单相通电时励磁电流的关系。
9、启动矩频特性:启动频率与负载转矩的关系称为启动矩频特性。
10、运行矩频特性/惯频特性:略
11、升降频时间:指电机从启动频率升到最高运行频率或从最高运行频率降到启动频率所需的时间。
12、DETENTTORQUE:是指步进电动机没有通电的情况下,定子锁住转子的力矩。DETENTTORQUE在国内没有统一的翻译方式,容易产生误解;反应式步进电动机的转子不是永磁材料,所以它没有DETENTTORQUE。
二、步进电动机的特点
1、步进电动机没有积累误差:一般步进电动机的精度为实际步距角的百分之3-5,且不累积。
2、步进电动机在工作时,脉冲信号按一定顺序轮流加到各相绕组上(由驱动器内的环形分配器控制绕组通断电的方式)。
3、即使是同一台步进电动机,在使用不同驱动方案时,其矩频特性也相差很大。
4、步进电动机与其它电动机不同,其标称额定电压和额定电流只是参考值;又因为步进电动机是以脉冲方式供电,电源电压是其最高电压,而不是平均电压,所以,步进电动机可以超出其额定值范围工作。但选择时不应偏离额定值太远。
5、步进电动机外表允许的最高温度:步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电动机外表温度在摄氏80-90度完全正常。
6、步进电动机的力矩会随转速的升高而下降:当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
7、步进电动机低速时可以正常运转,但若高于一定频率就无法启动,并伴有啸叫声。
步进电动机有一个技术参数:空载启动频率,即步进电动机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
8、四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。串联接法一般在电机转速较低的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
9、混合式步进电机驱动器的供电电源电压一般是一个较宽的范围(比如IM483的供电电压为12~48VDC),电源电压通常根据电机的工作转速和响应要求来选择。如果电机工作转速较高或响应要求较快,那么电压取值也高,但注意电源电压的纹波不能超过驱动器的最大输入电压,否则可能损坏驱动器。
10、供电电源电流一般根据驱动器的输出相电流I来确定。如果采用线性电源,电源电流一般可取I的1.1~1.3倍;如果采用开关电源,电源电流一般可取I的1.5~2.0倍。
11、当脱机信号FREE为低电平时,驱动器输出到电机的电流被切断,电机转子处于自由状态 (脱机状态)。在有些自动化设备中,如果在驱动器不断电的情况下要求直接转动电机轴(手动方式),就可以将FREE信号置低,使电机脱机,进行手动操作或调节。手动完成后,再将FREE信号置高,以继续自动控制。
12、用简单的方法调整两相步进电机通电后的转动方向,只需将电机与驱动器接线的A+和A-(或者B+和B-)对调即可。
相关文章购买变压器时重点考虑哪些参数

当准备购买一台变压器时,需要重点考虑哪些技术参数,具体参考如下:额定容量:变压器需要满足所供负荷需要。额定电压:把供电局供来的10KV电压变为0.4KV,考虑到线路损耗,变压器的额定电压一般为10±5%/0.4。
时间:2022-08-08 11:08:00
变压器的常用参数有哪些

对于任何一种变压器来说,其技术参数主要包括变压比、额定容量、额定频率、空载电流、频率响应、绝缘电阻、效率、温升等,下面具体来看下。
时间:2022-08-08 11:06:48
变压器的主要技术参数

变压器的主要技术参数有哪些,在给定的技术条件下,变压器的性能规定的“量值”,包括冷却介质的条件等,称为定额。定额中所规定的各量值称为额定值,这些额定值直接写在每台变压器的铭牌上。
时间:2022-08-08 11:04:48
降压变压器的工作原理及技术参数说明

降压变压器用于把10万V以上便于输送中的损耗降到用电户,降为380V的三相四线制才能安全使用。低压线圈采用铜箔绕制,箔式绕圈结构,增强了线圈的稳定性,固化后绕组整体机械强度好,大大提高了抗短路能力。
时间:2022-07-25 06:03:32
步进电机的几种驱动方式,步进电机驱动的实现代码

有关步进电机的知识,步进电机可以将电脉冲信号转变为角位移或线位移,那么步进电机的驱动方式有哪些,下文介绍了步进电机的常用术语及实现代码,一起来学习下。
时间:2021-11-27 11:10:59
电源变压器的6大技术参数

有关电源变压器的技术参数,主要包括了电源变压器的额定电压、额定电流、额定功率等参数,有需要的朋友参考下。
时间:2020-08-05 11:31:01
变压器容量的计算公式及参数说明

有关变压器容量计算公式的参数说明,变压器容量应根据计算负荷选择,对平稳负荷供电的单台变压器,负荷率一般取85%左右,用于计算负荷容量、变压器容量与负荷率。
时间:2020-08-04 09:47:25
柴油发电机润滑系统的组成与结构参数
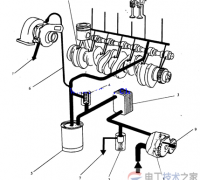
柴油发电机润滑系统的组成与结构参数,以康明斯6BT柴油机为例,由润滑油泵、调压阀、机油冷却器、滤清器旁通阀等组成,6BT柴油机润滑系统的结构参数说明。
时间:2020-05-19 09:46:39
- 上一篇:滑差电机调速器电路结构组成图解
- 下一篇:步进电机角度精度的计算方法