角度传感器的电路原理图及应用实例
来源:电工天下时间:2020-01-12 08:17:38 作者:老电工手机版>>
分享角度传感器的电路原理图及应用实例,角度传感器用来检测角度,角度位移传感器的工作原理,使用角度传感器控制轮子可以间接发现障碍物,角度位移传感器实例。
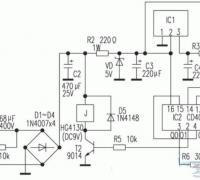
角度传感器的电路原理图
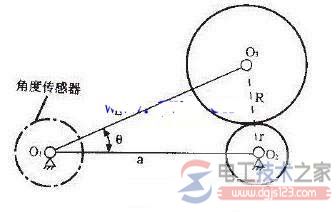
一、角度位移传感器原理
角度传感器用来检测角度的。
它的身体中有一个孔,可以配合乐高的轴。当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。往一个方向转动时,计数增加,转动方向改变时,计数减少。
计数与角度传感器的初始位置有关。当初始化角度传感器时,它的计数值被设置为0,如果需要,你可以用编程把它重新复位。
二、 角度位移传感器实际应用
使用角度传感器来控制你的轮子可以间接的发现障碍物。角度传感器的电路原理图及应用实例。
原理:如果马达 角度传感器构造运转,而齿轮不转,说明你的机器已经被障碍物给挡住了。此技术使用起来非常简单,而且非常有效;唯一要求就是运动的轮子不能在地板上打滑(或者说打滑次数太多),否则你将无法检测到障碍物。如果是一个空转的齿轮连接到马达上就可以避免这个问题,这个轮子不是由马达驱动而是通过装置的运动带动它:在驱动轮旋转的过程中,如果惰轮停止了,说明你碰到障碍物了。
在许多情况下角度传感器是非常有用的:控制手臂,头部和其它可移动部位的位置。
注意,当运行速度太慢或太快时,RCX在精确的检测和计数方面会受到影响。
事实上,问题并不是出在RCX身上,而是它的操作系统,如果速度超出了其指定范围,RCX就会丢失一些数据。Steve Baker用实验证明过,转速在每分钟50到300转之间是一个比较合适的范围,在此之内不会有数据丢失的问题。然而,在低于12rpm或超过1400rm的范围内,就会有部分数据出现丢失的问题。而在12rpm至50rpm或者300rpm至1400rpm的范围内时,RCX也偶会出现数据丢失的问题。
三、角度位移传感器实例
如果把角度传感器连接到马达和轮子之间的任何一根传动轴上,必须将正确的传动比算入所读的数据。
举一个有关计算的例子,在你的机器人身上,马达以3:1的传动比与主轮连接。角度传感器直接连接在马达上。
所以它与主动轮的传动比也是3:1.也就是说,角度传感器转三周,主动轮转一周。
角度传感器每旋转一周计16个单位,所以16*3=48个增量相当于主动轮旋转一周。角度传感器的电路原理图及应用实例
现在,需要知道齿轮的圆周来计算行进距离。幸运地是,每一个LEGO齿轮的轮胎上面都会标有自身的直径。
我们选择了体积最大的有轴的轮子,直径是81.6CM(乐高使用的是公制单位),因此它的周长是81.6×π=81.6×3.14≈256.22CM.现在已知量都有了:齿轮的运行距离由48除角度所记录的增量然后再乘以256.我们总结一下。称R为角度传感器的分辨率(每旋转一周计数值),G是角度传感器和齿轮之间的传动比率。我们定义I为轮子旋转一周角度传感器的增量。电工天下
即:
I=G×
在例子中,G为3,对于乐高角度传感器来说,R一直为16.因此,我们可以得到:
I=3×
每旋转一次,齿轮所经过的距离正是它的周长C,应用这个方程式,利用其直径,你可以得出这个结论。
C=D×π
在例子中:
C=81.6×
最后一步是将传感器所记录的数据-S转换成轮子运动的距离-T,使用下面等式:
T=S×
如果光电传感器读取的数值为296,你可以计算出相应的距离:
T=296×256.22/48=1580 距离(T)的单位与轮子直径单位是相同的。
另外,角度位移传感器有静态和动态之分。随着测控技术的发展,角度位移传感器必将想高精度、微型化、智能化发展,并将运用于更广泛的领域中。
相关文章家用吸尘器控制电路原理图及功能说明
有关家用吸尘器控制电路的原理图,家用吸尘器有可调速和不可调速两种,家用吸尘器控制电路的结构组成与工作原理分析。
时间:2022-09-21 13:16:14
一例可控硅自动恒流充电器的电路原理图
分享一个可控硅自动恒流充电器的电路原理图,该充电器不仅可以为各种镍镉电池充电,还可为干电池充电,并且充电电流是可调的,充电终止电压由RP1预先确定,下面具体来看下。
时间:2022-08-24 13:39:39
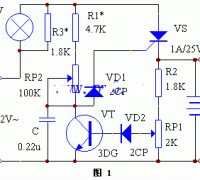
一例简单的光控报警电路原理图
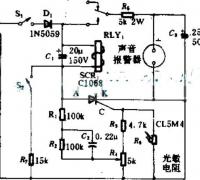
一例简单的光控报警电路原理图,如下所示:本电路用的二极管是in5059。以下是该电路的工作原理,有需要的朋友参考下。
时间:2021-12-04 07:05:12
一例简单的数字式长延时电路原理图
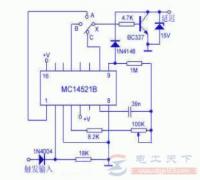
一例简单的数字式长延时电路原理图,以下是一种数字式长延时电路,摒弃了大电解电容和高阻抗电路,延时精确度比较高,有需要的朋友参考下。
时间:2021-12-01 06:27:20
一例排污泵的电路原理图
一例排污泵的电路原理图,以下是控制回路,自动控制比较简单,直接串联接触器的线圈,然后接转换开关。
时间:2021-08-27 13:35:39
一例15V直流电转12V直流电的电路原理图
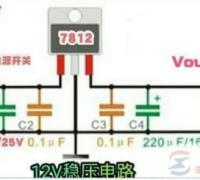
一例15V直流电转12V直流电的电路原理图,将15V直流电压转换成12V直流电压,输入输出压差只有3V,故可选用三端稳压集成电路7812降压来获得12V的直流电压。
时间:2021-08-02 11:07:34
一例简单的微型助听器的电路原理图

助听器是用来放大声音的,便不是单纯的放大器,助听器由麦克风、受话器等结构组成。以一个简单助听器的电路图为例,为大家介绍上助听器的工作原理及电路设计方法,一起来学习下。
时间:2021-08-02 10:58:37
一例dc12~85v通用led地摊灯的电路原理图
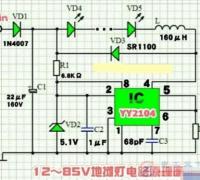
一例dc12~85v通用led地摊灯的电路原理图,YY2104是LED地摊灯中常用的一款降压恒流驱动IC,工作电压范围为12~85V,该IC还可以在其EN端(②脚)接入PWM信号来对LED进行调光。
时间:2021-08-02 10:56:10