红外自动干手器的控制电路原理图
来源:电工天下时间:2020-02-19 08:21:15 作者:老电工手机版>>
有关红外自动干手器的控制电路原理图,学习下红外自动干手器电路的工作原理,分析了该机电路,并画出电路图,以及红外自动干手器电路的常见故障原因与处理方法。
红外自动干手器的电路原理图
红外自动干手器电路原理,为便于维修剖析了该机电路,画出电路图(见附图)。并介绍常见故障原因及简单处理,供参考。
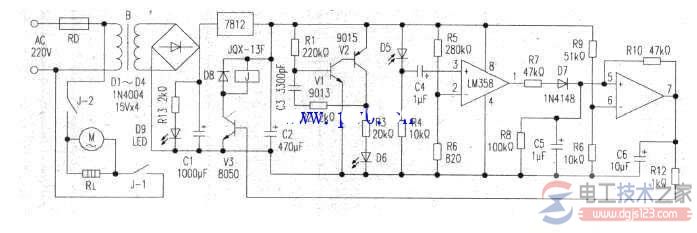
电路中由V1、V2、R1、C3构成一个40kHz振荡器,其输出驱动红外管D6发出40kHz的红外线光。
当人手伸到干手器下方时,被手反射的红外线由光电管D5接收,将其转换成半波脉动直流信号,该信号经C4耦合到第一级运放的正输入端进行放大,负端加入一个小的偏置电压,防止小信号干扰。
从①脚输出放大后的信号给R7、D7、C5整形及平滑处理成为直流信号,送到第二级运放⑤脚正输入端进行比较放大。
第二级运放翻转阈值由⑥脚负输入端外接的R9、R11分压决定,R10是运放的正反馈电阻,与C5、C6共同构成延时电路,防止被探测的手活动时,产生的干扰导致断电现象。
当运放⑦脚输出高电平时V3导通,控制继电器接通加热器和吹风机的电源。
相关文章家用吸尘器控制电路原理图及功能说明
有关家用吸尘器控制电路的原理图,家用吸尘器有可调速和不可调速两种,家用吸尘器控制电路的结构组成与工作原理分析。
时间:2022-09-21 13:16:14
压力罐电接点压力表自动上水如何设计电路图?

分享一个压力罐电接点压力表自动上水电路图,学习下压力罐电接点压力表自动上水的电路设计方法,需要的朋友参考下。
时间:2022-09-13 09:13:24
缺相断相保护装置如何接线,电路接线实物图
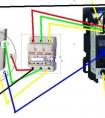
分享一个缺相断相保护装置接线实物图,缺相分主相位缺相和霍耳缺相,控制器在缺相状态下工作易烧毁,学习下缺相和断相保护装置的接线方法。
时间:2022-09-13 09:12:45
用二极管降压电路给电子钟供电的方法
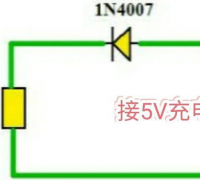
电子钟的电源电压多在5V以下,在用市电给耗电量较大的电子钟供电时,可以使用家中闲置不用的5V手机充电器,经过一个简单的降压电路降压后,就可以给电子钟供电了。
时间:2022-09-03 05:50:11
一例8050三极管发射极驱动继电器的改进电路图
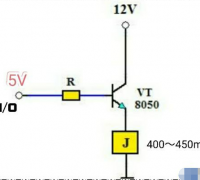
一个采用单片机IO口输出的5V电压通过8050三极管的发射极驱动一个工作电流为400~450mA的继电器,以下是电路图:上图是继电器驱动电路图,单片机IO口输出的5V驱动信号通过三极管VT的发射极控制继电器的工作。
时间:2022-08-26 06:30:37
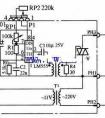
一例MT3608构成3.7v转12v的升压电路图
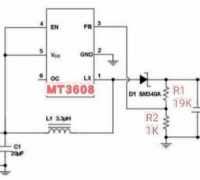
把3.7V的电压升高到12V,采用LM2577、XL6009这类升压IC无法胜任,这类元件无法在3.7V这么低的电压下工作,下面介绍一款低压升压电路中常用的DC-DC升压IC-MT3608,最低输入电压可低至2V,最高输出电压可达28V。
时间:2022-08-26 06:21:28
使用二极管正向压降设计的简单实用电路
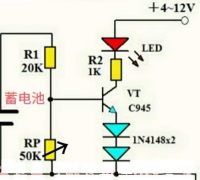
小功率硅二极管1N4148、1N4001等的正向压降一般为0.6~0.7V左右,在电路设计中巧妙利用二极管的正向压降,可以使电路更加简单,并且能降低成本,下面介绍二种利用二极管正向压降设计的简单实用电路。
时间:2022-08-26 06:21:18
一例多功能数字钟的电路图
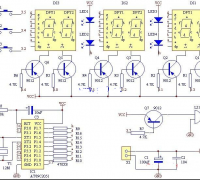
在该多功能数字时钟电路中,S1为功能选择按键,S2为功能扩展按键,S3为数值加一按键。在操作时连续短时间(小于1秒)按动S1,即可在以上多个功能中连续循环。中途如果长按(大于2秒)S1,则会马上回到时钟功能的状态。
时间:2022-08-24 13:50:55