步进电机角度精度的计算方法
作者:老电工时间:2015-12-29 12:24:18
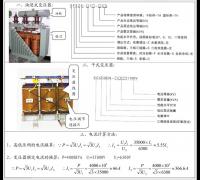
步进电机精度的计算方法
一、步进电机与其他电动机的差别:步进电动机一定要与控制脉冲联系起来才能运行,否则无法工作。
步进电动机最简单运行方式是与控制脉冲组成开环系统,这样的所谓增量位置控制系统与传统的交直流伺服系统相比,其成本明显降低,几乎不必进行系统调整。
因此,随着运动控制系统数字化到来,步进电动机的应用日益广泛。与之相适应,各国半导体厂商开发和生产了大量适用于步进电动机控制的专用集成电路。
步进电机前述的静态转矩特性为最重要的特性。
二、步进电机的角度精度
用高分辨率的编码器通过连轴器(使转动时不会发生旋转位移现象)直接连接,角度作为数字,读人计数器,用计算机进行计算。
结果通过打印机或X-Y绘图仪等设备输出,作为电机的评价资料。
1、位置精度:转子的任意点作为出发点,由此每一步测量一次,电机连续旋转一圈,求转子的实际位置与理论位置的差。
用正最大值与负最大值范围表示的误差,称为位置误差,用基本步距角的百分率(%)来表示。
2、步距角精度:转子从任意一点出发,连续运行时,求出各步进角度的实测角度与理论上的步进角度之差,用理论步距角的百分率〔%)表示,称为步距角精度,以1圈中的(+)侧与(-)侧的最大值表示。
3、滞环误差:转子由任意点正转1圈后,再反向旋转一圈返回原点,各测量位置的偏差角中取最大泣,称为滞环误差。
本站仅提供信息发布平台,文章仅代表作者个人观点。